|
Bill Zheng I'm a fourth-year undergraduate student at UC Berkeley studying Electrical Engineering and Computer Science. I am grateful to be advised by Professor Sergey Levine at Robotics, AI, and Learning Lab. I am also fortunate to work with Professor Kuan Fang and Professor Benjamin Eysenbach as well. I'm broadly interested in the intersection between machine learning and robotics, focusing on the idea of horizon generalization in real-world robot learning problems via the use of reinforcement learning. I am applying to PhD programs for Fall 2026! I'm also looking for internship opportunities for Summer 2026. |

|
|
[Dec. 2025] I will be attending NeurIPS in San Diego! [Nov. 2025] I will be attending Choose Good Quests in San Francisco. Looking for exciting topics to work on for robot learning! [Sep. 2025] TRA and TMD have been accepted by NeurIPS 2025! See you in San Diego! |
 |
Multistep Quasimetric Learning for Scalable Goal-conditioned Reinforcement Learning
Bill Zheng, Vivek Myers, Benjamin Eysenbach, Sergey Levine ICLR 2026 paper / website / code We demonstrate the effectiveness of using quasimetric distance representations in horizon-generalization by performing multistep backups. This allows us to scale up compositional tasks to real-world, pixel-based tasks using offline GCRL. |
|
|
Offline Goal-Conditioned Reinforcement Learning with Quasimetric Representations
Vivek Myers, Bill Zheng, Benjamin Eysenbach, Sergey Levine NeurIPS 2025 paper / website / code / arXiv Using a combination of Monte-Carlo contrastive learning and necessary invariances, we can find the optimal goal-reaching Q function with quasimetric representations in offline goal-conditioned reinforcement learning (GCRL). |
|
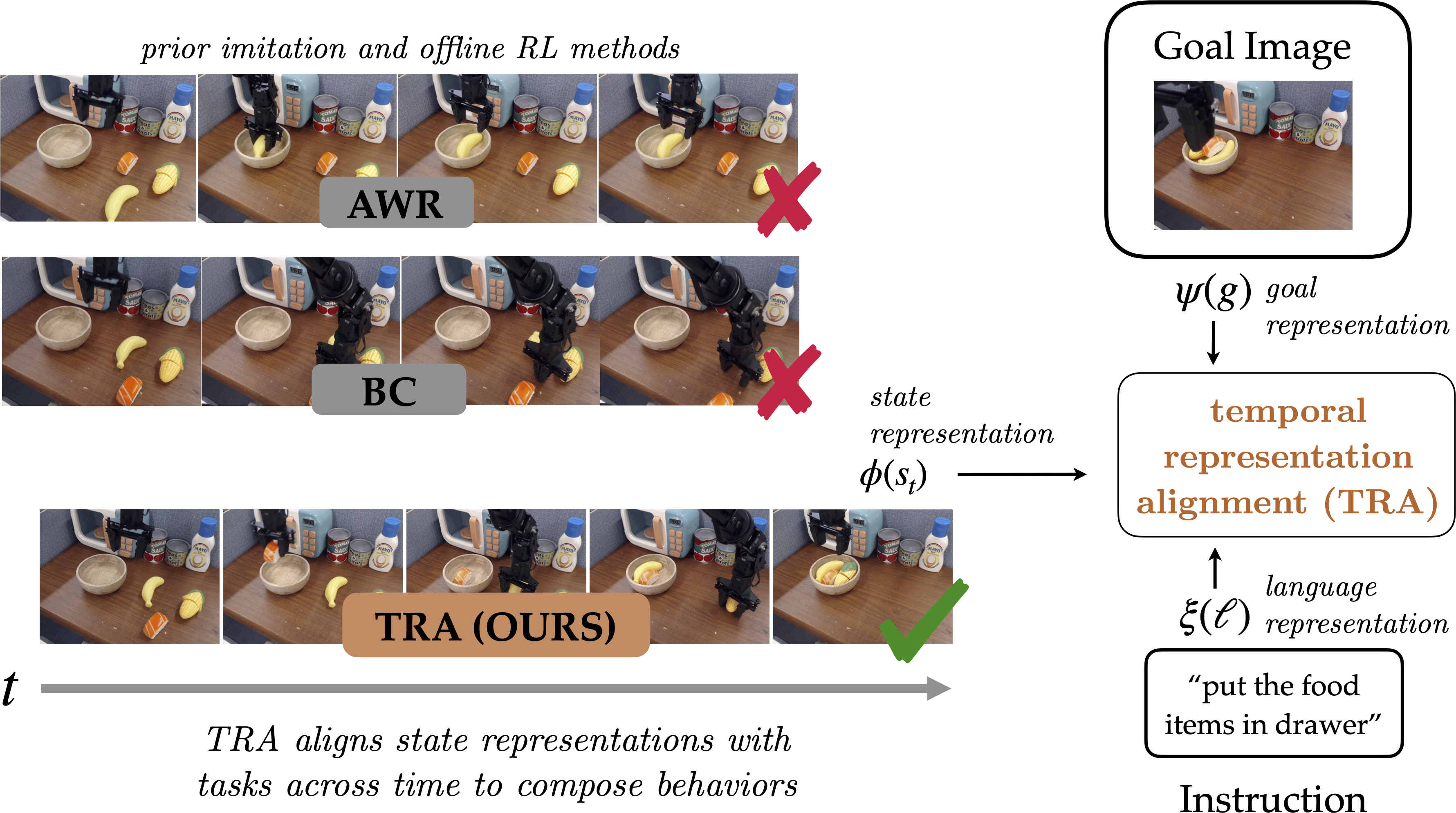
Temporal Representation Alignment: Successor Features Enable Emergent Compositionality in Robot Instruction Following
Vivek Myers*, Bill Zheng*, Anca Dragan, Kuan Fang, Sergey Levine NeurIPS 2025 Learning Efficient Abstractions for Planning Workshop, CoRL 2024 paper / website / code / arXiv We propose Temporal Representation Alignment (TRA), a policy learning method that utilizes the quasimetric property of temporal distances, and observe emergent capabilities in following compositional instructions when trained on a real world robot dataset. |
|
Policy Adaptation via Language Optimization: Decomposing Tasks for Few-Shot Imitation
Vivek Myers*, Bill Zheng*, Oier Mees, Sergey Levine†, Kuan Fang† CoRL 2024 project page / twitter / code / arXiv We propose an effective and sample-efficient nonparametric adaptation method for learning new language-conditioned robotic manipulation tasks by searching for the best language decomposition and executing these instructions in inference.
|

|
Course Coordinator, EECS16B (Designing Information Devices and Systems II), Computer Science Mentors |
MiscellaneousI grew up in Orange County, California, so my collection of favorite sports teams are peculiar (Go Warriors, 49ers, Angels, and Ducks!). In my (somewhat) free time, I like to enjoy the following:
|
|
Website template used from Jon Barron. |